

Author: Mark Brussel
Keywords
Links:
Introduction
The economic significance of road planning in hazard prone areas is high. By reducing natural hazard related damages to our roads, we can significantly reduce the resources that need to be spent on maintenance, rehabilitation and reconstruction, and we can lengthen their useful service life. All this will lead to a considerable reduction in expenditure. This is of crucial importance in the Caribbean region, where large chunks of capital expenditure are spent on road construction. In addition, preventing hazard related damages reduces secondary losses. These are losses associated with the closure of a section of road over a particular period of time, which reduces the alternatives for people to travel. This is particularly the case on many of the Caribbean islands, where few roads exist and most roads are vital lifelines that connect people to their work, education, health care, and other activities.
Developing roads in hazard prone areas is a challenging planning problem that involves a thorough understanding of many issues: the actual hazard conditions and their spatial extent, but also the location of people and facilities to be served, the topography, geology, land-use, land value, construction options/costs and others.
In this section we will discuss two analytical approaches to road planning in hazard prone areas. The first one is based on the evaluation of a set of predefined alternative routes, whereas the second one refers to the generation of an optimal route.
Since the execution of both methods typically involves Multi Criteria Analysis (MCA), reference is made to chapter 6.4 on Spatial Multi Criteria Analysis in the methodology book. In chapter 3.1.2. of the use case book, a practical example of the applied method is provided for the planning of a road between Dennery and Choc on the island of St. Lucia.
Objective
Provide a basic methodology for road planning in hazard prone areas that planners can use in their day-to-day work, when carrying out the planning themselves, when preparing terms of reference for advisory services or when supervising such services.
Users
Planners and engineers working on road planning in hazard prone areas, consultants.
Hazards involved
Of particular importance to road planning are high frequency hazards such as landslides and floods which are also the focus of the CHARIM project. Low frequency events such as earthquakes and tsunamis are less relevant because they occur seldom and their effects are difficult to quantify. On the islands, with respect to the transport sector, major damages occur to roads because of landslides that are triggered by high intensity rainfall events. In addition, man-made activities such as deforestation, irrigation and mining may have a negative impact on road related landslide hazard. Also, road construction itself often weakens a slope, as the road may cut through and destabilize it. The effect of landslides on roads is often that entire sections of the road are pushed out, leaving no other option than complete reconstruction. In other cases the road stops the debris flow, which makes it unpassable until it is cleaned up and the road surface repaired.
In the case of flooding, the trigger is mostly an extreme rainfall event. Such event usually causes damage to a road around its structures. Primary processes involved are erosion around structures such as bridges, culverts and drains, particularly if the water carries a lot of sediment and debris, which is often the case with the high energy flash floods that we see on the islands and in parts of Belize. Also here deforestation can be a key contributor to more frequent and high intensity flooding events, along with developments in the catchments at large.
Carrying out a proper hazard analysis is therefore an important input into the route planning procedure, without it, no proper analysis of risk can be made and routes may be chosen through areas that are unsuitable, leading to damage that could have been avoided.
Methodology
The basic objective of route planning that we are considering here is to find or choose the best route for a road between two locations.
However, what is the best route? In fact, in most cases, there is no such thing as the best route in the sense of the most optimal route, the alternative that stands out above the others, rather there will be a number of route options, all of which have their pros and cons, and determining which one is the best will depend to a large extent on who is making this judgment. Several stakeholders may have different opinions on which factors or criteria need to be taken into account and which importance should be attached to each criterion. For this reason, route selection of roads is a typical planning problem that involves multiple criteria and views of different stakeholders in decision making. Keeping the above in mind, for the purpose of this chapter if we refer to the best alternative, we mean the route that achieves the highest suitability scores of the alternatives in the methodology chosen, for a given set of criteria and for a certain stakeholder involvement.
As the simple illustration below shows, there may be different options to connect locations, each with their advantages and disadvantages. A route may be the shortest, but it may go through hilly terrain which could involve high construction costs and high costs for risk mitigation. The shortest possible route is therefore often not the most suitable route. Particularly in hilly and mountainous regions such as the eastern Caribbean islands, geological conditions and topographical conditions related to landslide and flood hazards are important in determining what the most suitable route is.
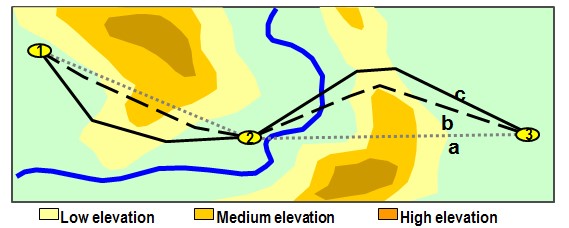
Figure 1 Illustration of the route choice problem
In literature, there are typically two approaches to route choice in road planning that can be also applied to hazard prone areas:
-
Evaluation of a set of predefined alternative routes on the basis of multiple criteria and with inputs from stakeholders
-
Generation of an optimal least-cost (or max benefit) route through a cost (or benefit) landscape
In the first method, usually the planning or infrastructure agency has already developed a number of alternative trajectories, out of which the best needs to be chosen on the basis of pre-defined criteria. This method is a typical multi-criteria evaluation method in which involved stakeholders can bring criteria to the table that they deem important. These can then be scored and weighted, leading to an overall score and the best choice among the alternatives provided.
In the second method, no predefined alternatives are provided, however a computerised optimisation is carried out to determine a so called least cost path. Such a path is generally based on the evaluation of all (usually thousands) possible routes through a landscape of costs (or benefits) that are based on particular criteria. This may be similar criteria as applied in the first method and in principle also here stakeholder input may be part of the process. We will also discuss this method in this section.
Method 1: Evaluation of a set of predefined alternative routes
To choose the best route for a road out of a selected number of alternatives will generally depend on many factors that all need to be considered. The most important ones are discussed in the section below. A methodology is proposed that guides the planner through a step-by-step approach as indicated in the flowchart. By clicking on the items in the flowchart that have an orange band, more detailed steps are shown within each phase when applicable.
The flowchart below provides an SMCA based approach to the route planning problem. We refer to chapter 6.5 on MCA for more details on the general method.
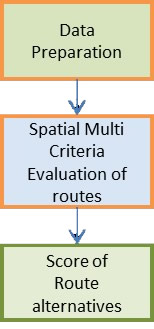 Figure 2 Main methodology
Figure 2 Main methodology
Data preparation
In the data preparation phase, the relevant input data needs to be prepared for the SMCA. First of all, the alternative routes need to be chosen and the route networks need to be made available in GIS format. Secondly, a discussion should be held on which factors are to be involved in the SMCA and how these can be developed into criteria maps. These factors could be:
Hazard areas to be avoided, or risks to be mitigated
Distances to communities and production areas to be served, people and activities in the catchment of the road
Impact on the environment
Interference with conservation areas
Slopes and other topographical features
Engineering design issues for the routes concerned
Cost of construction
Cost of operation and maintenance (also under hazard events)
Other...
The above already indicates that proper route planning can be a very complex and data intensive exercise. The adding of more and more criteria however is not necessarily recommended, as it will only average out the final suitability scores and add complexity to the analysis. It is advisable to select only key criteria and work with those, certainly in a first iteration, and possibly at a later stage do a second iteration with additional criteria to fine-tune or to evaluate differences between two final route alternatives.
A lot of the information that needs to be collected will come in the form of maps, such as the items mentioned under 1,2,3, 4 and 5, others may also come as not spatial criteria in the MCA, although they will always have a spatial component, e.g. 6, 7 and 8. In carrying out the SMCA we can also incorporate the non-spatial criteria, depending on the software that we use for this purpose.
Prior to the carrying out of the SMCA this information needs to be prepared in such a way that it can be used as a criterion map. For example, if one of the criteria is the number of inhabitants that is located within 500 m of the road to be planned, a GIS analysis needs to be done in which population data are overlaid on a buffer map of the roads to produce a criterion map. It should be noted that all maps that are to be used in the SMCA need to be raster maps of the same spatial extent and resolution and therefore need to be prepared as such. An illustration of this process is given in use case 3.1.2 in this handbook.
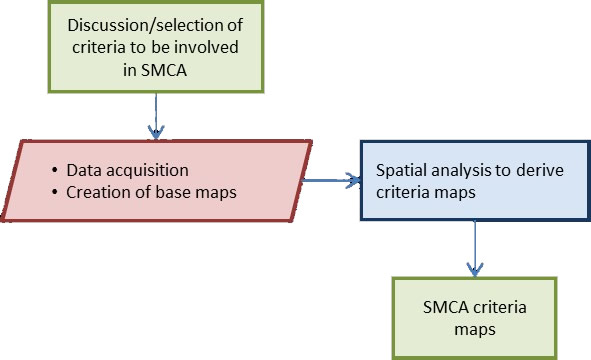
Figure 3 Data preparation phase
SMCA
In this phase the actual evaluation of the route alternatives takes place. It allows for the involvement of stakeholders in the final decision on which criteria to include and in the weighting of the criteria scores. If required, certain visions/scenarios can be built into this process. E.g. a low hazard vision, where the maps that present the hazards are given a high weight, or an environmental vision, where the impact on the environment is given more importance. The use of visions can be a useful way to represent the interests of certain stakeholder groups that come to the table with a particular perspective (e.g. environmental NGO™s, the transport sector, banks, etc. etc. ) that can be modelled through a scenario approach. Figure 4 provides an overview of the SMCA phase.
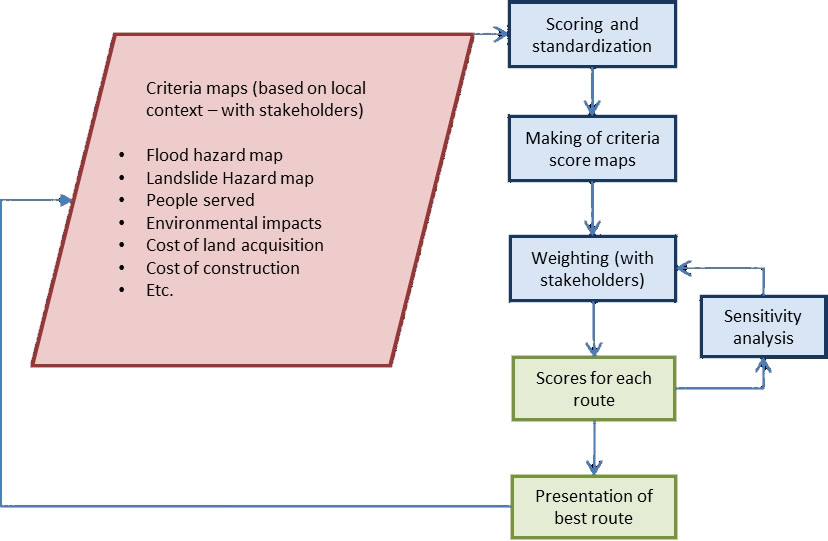
Figure 4 Spatial Multi Criteria Analysis phase
As can be seen from the flow-chart, the methodology can be used iteratively, where in a second iteration other criteria can be added, or changes to criteria maps can be made based on potential interventions, e.g. to reduce the hazard in a certain location through structural measures.
Often use is made of a so called criteria tree, in which all criteria are listed and grouped and provided with their respective weights. The tree allows for a hierarchy in criteria, by grouping sub-criteria under a main criterion as can be seen in Fig. ... Also it can be visualised whether a particular criterion is a cost or a benefit criterion. The sub criteria are weighted independently, summing up to 1, whereas the main criterion will be given a weight between 0-1 so that the total weight of all main criteria equals 1 (refer to Figure 5 below)
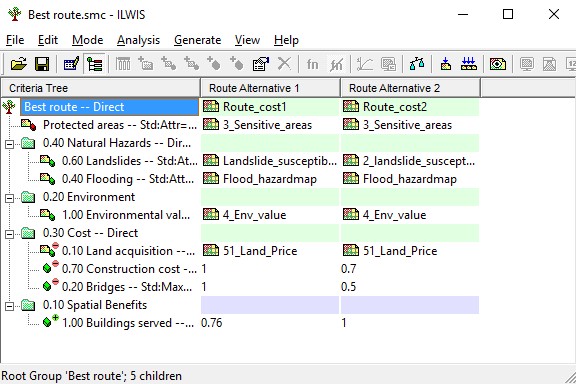
Figure 5 Example of a criteria tree in ILWIS SMCE
In this procedure it is also possible to consider a sensitivity analysis as part of the approach, to test the robustness of the assessment. This usually makes sense after different iterations and scenarios have been completed. If suitability scores remain relatively unchanged even after alterations, then this implies a robust assessment. There are different ways to carry out sensitivity analysis, as discussed in section 6.5 of the methodology book. As a result of the sensitivity analysis it is clear to what extent the suitability scores are sensitive to the values of the different criteria maps and the weights obtained. This can prompt a more detailed analysis of input data, or a different setting of weights. For example, it could be that the suitability score of a location is very sensitive to its being just inside, or just outside a low risk area. If this is the case, the quality of the risk map should be verified to ensure that the limits between these zones are real.
At the end of the analysis an overall score is generated for both alternatives and the best alternative is known. This may then prompt a further analysis such as a Cost Benefit Analysis to evaluate whether road construction is sensible from an economic perspective.
Generation of an optimal least-cost (or max benefit) route through a cost (or benefit) landscape
In the case that no route alternatives are on the table, it is also possible to carry out an automated route assessment in GIS. In such case all possible routes between the two locations are evaluated on the basis of the result of the criteria scores. In principle many of the same criteria can be used for this approach, and the same method of scoring and weighting, but some of the maps would need to be redeveloped. In this procedure it is important that the criteria maps carry values for all locations (a full raster), so that all possibilities are evaluated. Absence of values implies that no route can be generated to that part of the area, so this situation should be avoided, unless we are dealing with a spatial constraint criterion. Also here it is crucial that criteria are defined as being cost criteria or benefit criteria. The final route calculation procedure should be done on either cost criteria only or benefit criteria only; in the former case the benefit criteria need to be inverted and turned into cost criteria, and in the latter case the cost criteria should be inverted to benefit criteria.
Also here, the procedure is often iterative, as the automated optimisation may offer surprising results that are due to errors or inconsistencies in the data, scoring decisions, or a too rigid weighing scheme. After several iterations more robust routes can be found. The process of this method is provided below:
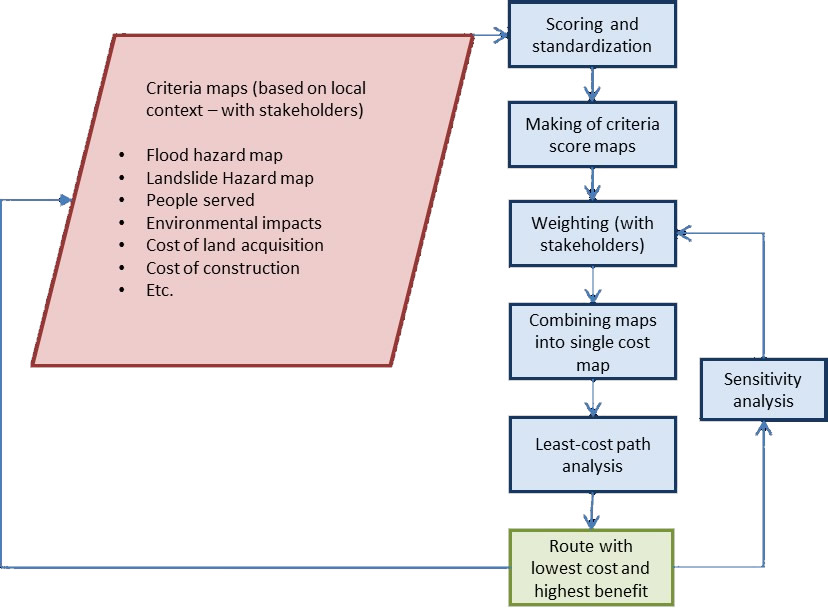
Figure 6 Least cost path procedure
Literature
Chandio, Matori, WanYusof, Talpur, Khahro and Mokhtar, 2012. Computer Application in Routing of Road using Least-Cost Path Analysis in Hillside Development. Research Journal of Environmental and Earth Sciences 4(10): 907-911, 2012
S.S. Keshkamat, J.M. Looijen and M.H.P. Zuidgeest, 2009. The formulation and evaluation of transport route planning alternatives: a spatial decision support system for the Via Baltica project, Poland. Journal of Transport Geography 17, 54“64
A. K. SAHA, M. K. ARORA, R. P. GUPTA, M. L. VIRDI and E. CSAPLOVICS, 2005. GIS-based route planning in landslide-prone areas. International Journal of Geographical Information Science, Vol. 19, No. 10,